測位精度と受信感度の向上により安定した位置情報を取得。

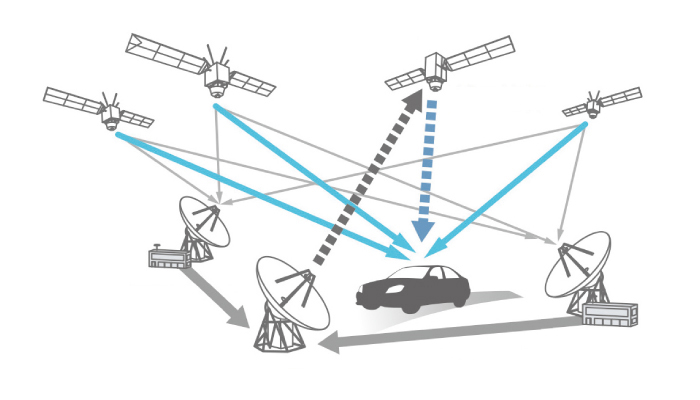
あらゆるシチュエーションにおいて正確な自車位置を実現するため 「GPS」「みちびき」「グロナス」「SBAS」に対応。 これらの高度なシステムにより測位精度と受信感度が向上。
さらに「6軸3Dハイブリッドセンサー」を搭載、衛星が届きにくい場所でも正確に自車位置を判断して極めて誤差の少ないトレースを行います。
補正情報
をアップ
補正情報
GPSデータ
GPSデータ
「GPS」「みちびき」「グロナス」「SBAS」に対応
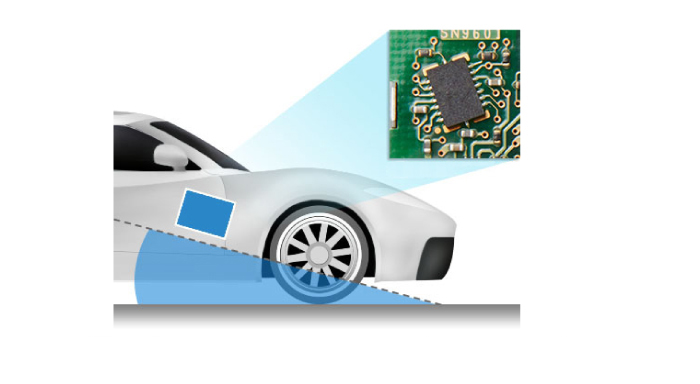
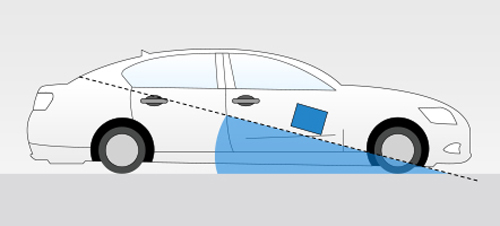
クルマの取付角度を考慮して
センサーはあらかじめ斜めに設置
「6軸3Dハイブリッドセンサー」で衛星が届きにくい場所でも高度な技術で自車位置を判断
道路以外の走行も正確に認識
[マルチフィールドマップマッチング]

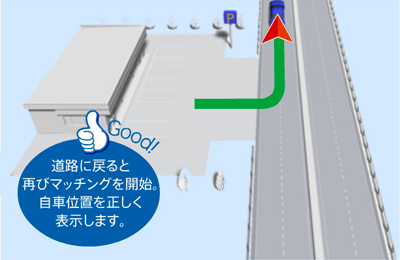
コンビニの駐車場やガソリンスタンドなどの道路以外でも、旋回や速度変化などの車両の状態を速やかに考慮し、地図データを照会することで道路から外れたことを認識、道を外れたことによる小さな誤差も見逃さず正確に自車位置を表示します
立体駐車場に入ってもズレない
[傾斜旋回補正アルゴリズム]
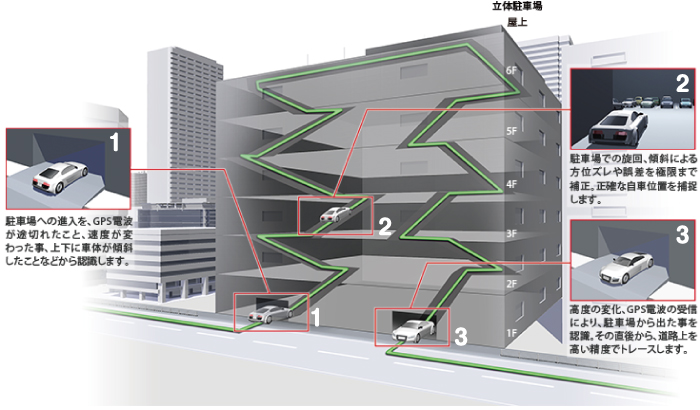
駐車場マップが収録されていなくても6軸3Dハイブリッドセンサー搭載の感度補正テクノロジーで旋回や傾斜による方位ズレや誤差を補正、正確な自車位置表示が可能です
傾斜角度を判断し自車位置を正確に見極める
[3Dマップマッチング/傾斜データ]
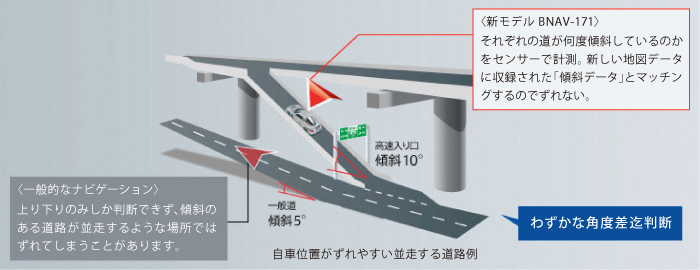
高性能の6軸3Dハイブリッドセンサーで判断した傾斜角度を地図データに組み込まれた独自の傾斜データと照合し、自車位置を正確に判断し表示します
より滑らかに地図をトレース
[10Hz測位]
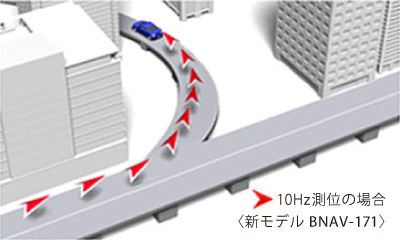
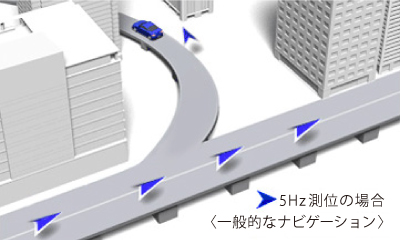
1秒間に10回というスピードで自車位置の測位と地図上への表示を実施 カーブ走行時や誤認識しやすい分岐などでもこれまで以上に自車位置がズレることなく滑らかに地図上の道をたどります
表示までの1秒の遅れさえも解消
[表示位置補正]
新モデル BNAV-171の場合
車速に応じて補正距離
を計算し、表示のタイミン
グをあわせるので時速80Km
でも時速40Kmでもずれない

一般的なナビゲーションの場合
自車位置と表示がずれる
クルマの条件にあわせて自動補正
[取付角度自動補正機能]

車種によって異なる取付位置にも角度を自動認識して補正して対応可能
[タイヤ外径変化検出機能]
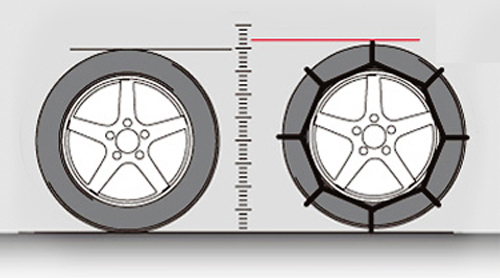
タイヤの微細な変化や、夏/冬のタイヤ交換時、チェーン装着時の形状の違いまで自動的に感知して素早く検出~速やかに補正します
[センサー学習補正]
測定誤差の算出補正の要である「6軸3Dハイブリッドセンサー」により学習補正性能をさらに向上
車両情報の微妙な変化まで補正して、いつでも高い自車位置精度を保ち続けます