


マップマッチングによる自車位置検出の補正について

マップマッチングとは、GPSなどで得られた現在地の情報と今までに走行してきた道路を比較して、最も適切な道路上に現在地を補正させるシステムです。
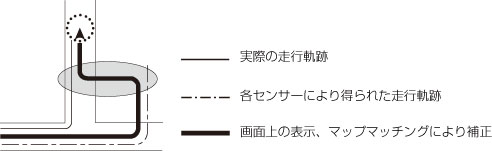
本機では、自立航法と衛星航法を組み合わせて得られた現在地の情報を、道路形状に合わせて補正させています。
しかし、現在地の誤差はどうしても避けられない為、マップマッチングで補正しても現在地が実際の位置からずれる場合があります。
また、地図データと実際の道路形状が異なる道路を走行すると自車マークがずれる場合があります。

本機の電源を入れた直後は、動作が安定していないため、お車を動かすと、自車マークが実際と異なる動きをする場合があります。しばらく走行すると、動作が安定するため、通常の動きに戻ります。
