社用車の事故防止に役立つ「高精度データ」 通信型ドライブレコーダーの進化で取得技術がより高度に!
【特集:ドライブレコーダーの進化に迫る】
ここ数年、ドライブレコーダーの普及が進み、さらに通信型ドライブレコーダーなどの登場で、機能面の進化も続いている。他方、交通事故の件数は全体的に減少傾向であるものの、悲惨な事故はいまだ根絶していない。
社用車を保有する企業にとっても、交通事故は大きな悩みの種。ひとたび事故を起こせば、直接的な損害はもちろん、従業員の身の安全が脅かされたり、企業の社会的信用が失墜したり、さまざまな間接的な損害が生じる可能性もある。それらの損害を防ぐ目的で、ドライブレコーダーを車両管理に活用するニーズが高まっている状況だ。
2023年2月、デンソーテンは通信型ドライブレコーダー向けの新技術を発表した。今回、この技術について、九州大学大学院で交通心理学などのオートモーティブサイエンスを研究する志堂寺和則教授と、デンソーテンのエンジニアである三野敦の対談を行った。新たな技術は、「安心・安全」のニーズにどう応えていくのだろうか?

「信号検知」で危険な運転を自覚する
――今回は、2月に発表された通信型ドライブレコーダー向けの新たな技術について、技術の詳細や、どう事故防止につながるのか伺います。まずは「信号検知技術」について教えてください。
三野:信号検知技術は、その名の通り、運転中の自車両に搭載したカメラの映像から、信号を検出する技術です。この技術を実現する上で課題となった点は2つありました。
まず1つ目の課題が、遠くに映る小さい信号を検知することです。信号検知技術は、一般的な交差点の形状を考え、基本的に停止線からおよそ20mから30m先にある信号の検知を想定しています。肉眼だとそう遠くないように感じるかもしれませんが、カメラで撮影した画像で見るとサイズが非常に小さい物体です。
また、弊社のドライブレコーダーに搭載しているカメラは、幅広い視野を確保できる広角レンズを使用しています。広角になるほど被写体も小さく写りますから、物体を検知する難易度は上がります。
これらの課題に対して、弊社は、軽量かつ小さい被写体でも検知性能が高いAIモデル(CNN: convolutional neural network)を独自の技術で開発しました。この開発が成功したことで、高い検知精度を実現できました。
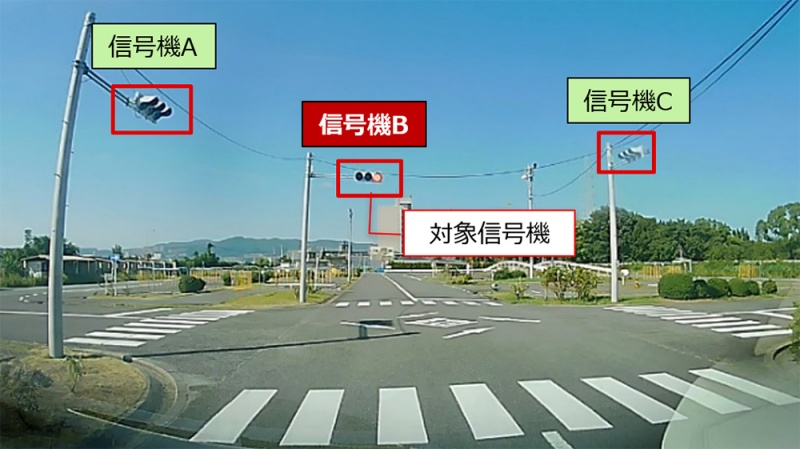
信号検知のイメージ
―――2つ目の課題とはなんでしょうか?
三野:2つ目の課題が、検知した複数の信号から、自車両が従う信号を特定することです。
この課題については、自車と信号との相対的な位置関係を、幾何計算により算出することで対応しています。自車が信号に対してどんな経路で通過しているのか、あるいはどんな位置関係なのか、これらの情報を分析して、自車が従う対象となる信号を推定しています。
交差点の形態、信号の種類や位置は多種多様ですが、いろいろな状況に対応できる必要があります。特殊な交差点でも検知できるように、直接現場に行って、経路や位置関係などを実測しながら、アルゴリズムを適合させていきました。
――信号検知技術は、どんな機能に生かされるのでしょうか?
三野:例えば、この技術を活用すれば、赤信号で通過した場合「信号無視」と判定できます。そのほか、信号待ちをしていて青信号に変わったことに気づかない場合、ドライバーに通知することも可能です。

デンソーテン コネクティッド事業本部 先行システム開発部 第一開発課 三野敦
――信号無視は明らかな交通違反ですが、実際の道路交通では微妙なタイミングで交差点を通過するシーンは多く見られます。そこで志堂寺教授に伺いますが、これらの運転行動をしてしまうドライバーは、どんな心理状態にあるのでしょうか?
志堂寺氏:大きく分けると、2つのタイプがあります。まず一つ目は、「うっかり、ぼんやり」のタイプ。このタイプの問題は、本人が信号無視をした意識がないこと、つまり、リスクに無自覚であることです。もう一つが、「まあいいか、行っちゃえ」と意図的に信号無視をするタイプ。こちらは、リスクを過小評価している点が大きな問題です。
実際、そうした行動を起こしても必ず事故になるとは限りません。しかし、事故が起きないことで、運転が悪い方へとシフトする可能性があります。「危険な運転をしても事故が起きなかった」という経験が蓄積することで、誤った自信を持ってしまうんです。

九州大学大学院 システム情報科学研究院 情報学部門 志堂寺和則教授
――となると、危険な運転行動をしてしまった場合、それを自覚する必要がありますね。
志堂寺氏:今回の信号検知技術で、信号無視などを検出できるなら、今までドライバー自身が自覚していなかった危険な運転行動がわかるようになりますから、それをもとに安全運転教育に生かせるだろうと思います。
三野:安全運転教育に関する機能でいうと、信号通過をトリガーにして、該当する映像を後でピックアップしたり、走行データとあわせて確認したりすることが可能です。
志堂寺氏:欲しい情報だけを集められる点はいいですね。全ての車両の映像をチェックするとなると、相当な労力になりますから。
「車線検知」で、ながら運転・居眠り運転の防止に
――続いて、同じく新技術として発表された「車線検知技術」について教えてください。
三野:この技術で重視したのは、かすれた白線の検知率を高めること、さらに豊富な種類の車線も判定できることです。やはり、使える場面が限定されてしまうと、ユーザーの使い勝手が悪くなりますから、いろいろな状況に対応できるようこだわりました。
こちらの技術については、機械学習ではなく、人の手で組み上げたアルゴリズムを使用しています。画像データの濃淡をもとにヒストグラム解析(※)を行い、白線が分布する領域と、それ以外(路面など)の領域を分離する処理を行っています。
※ヒストグラム:量的データの分布の様子を見るのに用いられる分析手法。データをいくつかの階級に分け、度数分布表を作成してからグラフを作成する。
(参照:総務省統計局『なるほど統計学園』)
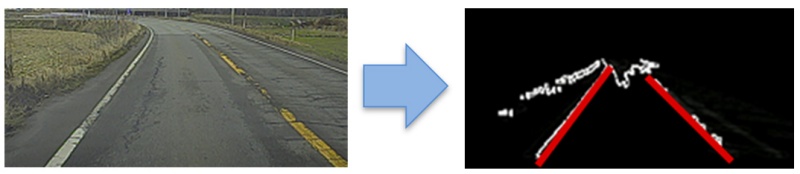
実際に記録した映像のヒストグラム解析(車線検知)
ただ、その処理だけでは、綺麗な白線を検知できても、かすれた車線の検知はしにくいんです。そこで、画像を平面ではなく空間で捉える工夫をしています。空間をいくつかの領域に分割し、領域ごとにヒストグラムを作り、車線の延長線上のデータを積み上げることで、検知性能を大きく向上させました。
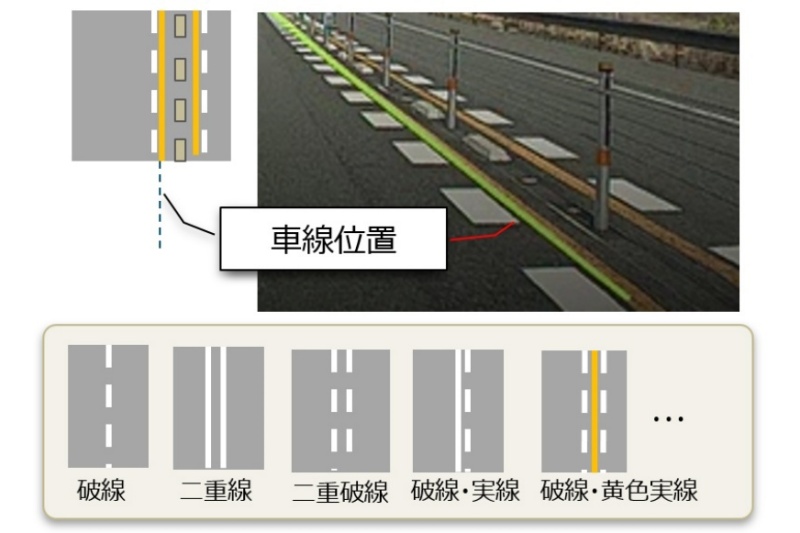
車線の種類に応じた車線の位置を検知
――この技術を使うと、どんな運転行動を検知できるのでしょうか?
三野:車線検知技術で想定しているのは、ドライバーの漫然運転などが原因で起きる車線の逸脱やふらつきといった運転行動の検知です。
志堂寺氏:それらの運転行動の原因として多いと考えられるのは、居眠り運転や運転中にスマホを操作するなどの「ながら運転」でしょうね。これらの危険な運転をしていた場合、なぜそんな運転をしていたのか考えるよりも早く、すぐ注意する必要があります。その手掛かりとして、この車線検知技術は有効でしょう。
検知精度を支える「オートキャリブレーション」とは?
――次は、「オートキャリブレーション」について教えてください。
三野:オートキャリブレーションは、先に説明した信号検知と車線検知に欠かせない、高い検知精度を支える技術です。
この場合のキャリブレーションとは、カメラの取り付け角度(自車に対するカメラの方向・向き)を正確に「認識」させる作業を指します。従来は、車外に置いたマーカーをカメラに映し、キャリブレーション開始ボタンを押すと、自動でカメラの取り付け角度を認識させる方法でした。
一方、従来の課題には、取り付け作業にマーカーが必要であることや、マーカーの配置位置の調整などで作業環境によるばらつきの発生などがありました。また、取り付け後に何かの拍子で角度が大きくずれてしまうと、正確に物体を検知できない事態が起こり得るんです。
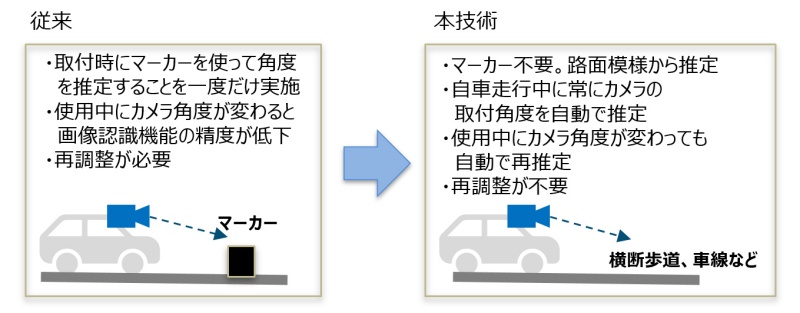
従来技術とオートキャリブレーションのイメージ
オートキャリブレーションは、取り付け時にマーカーが不要になり、さらに自車が走行している最中に取り付け角度を自動で補正してくれる技術です。この技術によって、さまざまな運転行動を検知する精度が飛躍的に向上しました。
志堂寺氏:ドライバーが起動スイッチなどを押して開始する仕組みなんですか?
三野:いえ、ドライバー側で何かする必要はありません。運転中は自動で作動している状態になっています。
志堂寺氏:常にキャリブレーションしながら走っている、ということですね。ドライブレコーダーを取り付けてからしばらく経つと、徐々に角度がずれることはあり得ます。多くの社用車を抱えている企業だと、どの車両がずれているのか管理するのも一苦労ですから、自動で補正してくれるのはありがたいでしょうね。
――検知精度が向上することで、安全運転教育に活用するデータとしての価値も高まるでしょうか?
志堂寺氏:安全運転の指導教育は、正確なアドバイスやフィードバックが大切ですから、間違っているかもしれないデータをもとに指導しようとしても、説得力に欠けるでしょうね。
ただ、何かしらのノイズが入ることは多々あるので、正確なデータを取得できることは、当たり前のように思えて実際は難しいことなんです。 その意味で、危険な運転行動の検知精度が向上することは大変重要だと思います。
通信型ドライブレコーダー向け「エッジAI」は何ができるのか?
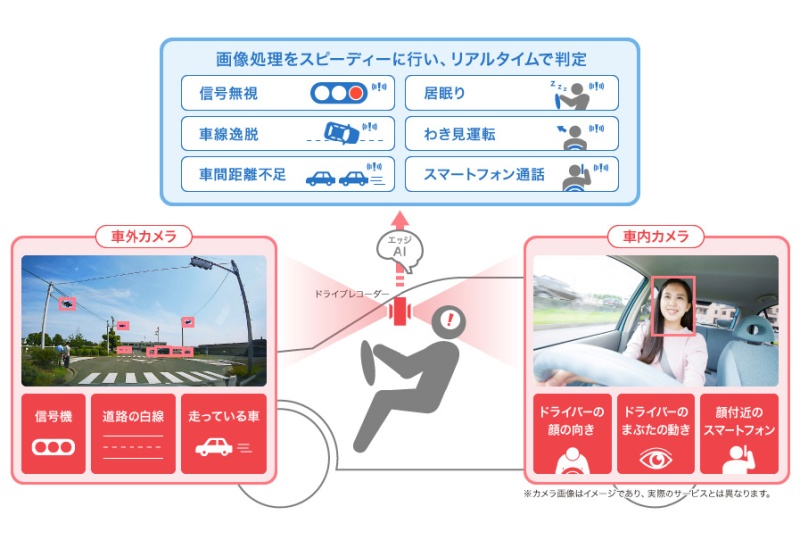
通信型ドライブレコーダー向け新技術のイメージ図
――今回の発表では、これらの技術のベースとして、エッジAIにも触れていましたよね。
三野:エッジAIを活用する場合、クラウドサーバー経由のように多くのリソースは割けませんので、軽量かつ高速であることが求められます。
クラウドを経由せず、ドライブレコーダー側で処理するメリットは、信号や車線などをリアルタイムで検知できることです。また、今回の技術発表では紹介しきれませんでしたが、実は車間距離などの検知も車載器側で処理することが可能です。
――リアルタイム通知のメリットについて志堂寺教授に伺います。危険な運転行動が即座にわかることは、指導効果の向上につながるでしょうか?
志堂寺氏:例えば、昼の運転行動を夜になってフィードバックされても、本人が細かい状況を覚えていない可能性があります。そういう意味で、運転行動の改善に生かしにくいと言えます。一番効果的なのは、リアルタイムに知らせることでしょう。危険な運転行動をしたら、アラートを鳴らして「今の運転は危なかった」とドライバーに自覚させることが大切です。
即座に知らせることですぐに修正できますし、日頃から修正を続けていると、危ない状況に陥りそうになると、自分で先読みして気づけるようになっていくと思います。
高精度のデータを安全運転教育に活用する重要性

――ここまでのお話を踏まえると、高い精度で正確なデータを検知することは、安全運転に欠かせないポイントであると感じました。
志堂寺氏:やはり、効果的な安全運転教育は、正しいデータを取得できることが前提になるでしょう。その次のステップとして、データを使った安全運転の教育や啓発があります。
――次のステップは、どうデータを活用するのかということですね。
志堂寺氏:管理者などが指導教育を行う際も、確かなエビデンスが重要になります。その確かなものとして、画像や映像がありますが、それだけでは曖昧さが残ります。一方で、速度や距離などの数値だけわかっても、高い効果は望めません。映像と数値が組み合わさることが重要です。
両方そろうことでリアリティが生まれますし、管理者とドライバー双方にとってわかりやすく有用な情報となります。また、人それぞれ運転の癖がありますから、自分がどういうタイプなのか、あるいはどこを直せばいいのかも、正しいデータを活用することで見えてくるんです。
――これからも、AIや画像認識の技術レベルは向上し続けると思います。最後に、これからの展望についても教えてください。
三野:「より正確により早く」という点は、引き続き重要なテーマになると思います。少し先の話をしますと、車両が走っている状況の検知を、さらに詳しく行う必要があると考えています。
例えば、横断歩道や標識、歩行者の検知、ほかにも運転中のドライバーがそれらの対象に目線を向けているかなど、多様な情報を統合して、より安全なシステムを構築していきたいです。
志堂寺氏:確かに、ドライバーが運転中にどこを見ているか知ることは、非常に大事です。そこまで技術が向上すれば、今よりもっと安全な運転へとつながるでしょうね。
社有車が交通事故を起こすと、損害賠償はもちろん、保険料のアップ、会社のイメージダウンなどさまざまな問題が発生します。
『Offseg』は社有車の安全運転管理をかんたんにおこなうことができるドライブレコーダー。データ収集・分析などを自動化し、運用の手間をかけずに交通事故を未然に防ぐことが期待できます。
こちらの記事もおすすめ
-
 2023.03.24
2023.03.24安全運転意識の向上を事故防止につなげるには?【実践方法付き】
【特集:ドライブレコーダーの進化に迫る】 社用車を管理する企業にとって、交通事故の防止は...
-
 2023.03.03
2023.03.03企業が実践する交通事故防止とは?現場の対策例をまとめて紹介
企業が実践する交通事故防止とは?現場の対策例をまとめて紹介 自動車は私たちの生活を便利に...
-
 2023.02.03
2023.02.03「安全運転義務違反」は重大事故の入口?弁護士が徹底解説
【特集:ドライブレコーダーの進化に迫る】 安全運転の重要性は多くのドライバーが認識してい...
-
 2022.12.21
2022.12.21「社用車で事故が起きたら?」弁護士が不測の事態に備える方法を解説
【特集:ドライブレコーダーの進化に迫る】 交通事故の件数は年々減少している一方で、“交通...
-
 2022.03.29
2022.03.29特集「ドライブレコーダーの進化に迫る」を初めて読む人はまずはこちらから!
コネクティッドカーが進化を続ける中で、人とクルマをつなぐインターフェースの重要性が高まっ...
-
 2021.10.22
2021.10.22「会話するAI」が運転指導? データ活用の最前線【大阪大学×デンソーテン】
コネクティッド技術の進展によって、ドライバーは道路状況や現在地の周辺で利用できるサービス...
-
 2022.11.24
2022.11.24整備のプロが教える「日常点検」 事故防止につながる社用車の管理とは?
【特集:ドライブレコーダーの進化に迫る】 クルマ本体のトラブルを防ぐために欠かせない日常...
-
 2022.10.05
2022.10.05「ながらスマホ」がご法度の現代こそ、知っておきたいネット・ゲーム依存
【特集:ドライブレコーダーの進化に迫る】 SNSやソーシャルゲームなど、今やスマートフォ...
-
 2022.09.05
2022.09.05ウェアラブルデバイスの最前線と、コネクテッドカーの未来予想図
【特集:ドライブレコーダーの進化に迫る】 スマートウォッチの普及が進み、ウェアラブルデバ...
-
 2022.08.23
2022.08.23鍵は「リアリティ」にあり!交通心理学から見た事故防止とは?
九州大学大学院 システム情報科学研究院 志堂寺和則教授 【特集:ドライブレコーダーの進化...
-
 2022.08.04
2022.08.04拡大する「働くクルマ」の役割 視覚を助けるインターフェースとしての可能性
【特集:ドライブレコーダーの進化に迫る】 CASEやMaaSといったキーワードに代表され...
-
 2022.07.07
2022.07.07企業を悩ます飲酒運転、根絶に向けて何に取り組むべきなのか?
【特集:ドライブレコーダーの進化に迫る】 道路交通法施行規則が改正され、安全運転管理者は...
-
 2022.03.08
2022.03.08AIが教習指導員に?人とシステムが共生する安全運転のあり方
【特集:ドライブレコーダーの進化に迫る】 「若者の車離れ」と言われるようになって久しい。...
-
 2022.06.23
2022.06.23「社労士に聞く安全運転管理」社有車を円滑に運用するルール作りとは?
【特集:ドライブレコーダーの進化に迫る】 社有車の事故防止や安全運転管理は、企業が継続的...
-
 2022.02.08
2022.02.08加齢で変わる運転操作 運転行動を記録するドライブレコーダーの活用法は?
【特集:ドライブレコーダーの進化に迫る】 ここ数年、高齢運転者の免許返納問題について盛ん...
-
 2022.01.11
2022.01.11意外と知らない、居眠り運転の防ぎ方【睡眠専門医・坪田先生インタビュー】
【特集:ドライブレコーダーの進化に迫る】 通信型ドライブレコーダーは、取得した走行データ...
-
 2021.12.10
2021.12.10あおり運転はなぜ起きる?仕組みと対処法を専門家に聞いた!
【特集:ドライブレコーダーの進化に迫る】 2020年6月、道路交通法が改正され、「妨害運...
-
 2021.10.21
2021.10.21ヒヤリハットを自動運転の安全基準づくりに! ドライブレコーダーの新機軸
【特集:ドライブレコーダーの進化に迫る】 デンソーテンが開発する通信型ドライブレコーダー...
-
 2021.10.21
2021.10.21「右折時どこを見ていますか?」ドライブレコーダーの事故防止への活用を探る!
【特集:ドライブレコーダーの進化に迫る】 「さっき交差点を右折したとき、どこを見ていまし...
Contact USお問い合わせ・資料請求

