DENSO TEN Technical Review
デンソーテンテクニカルレビュー
通信型ドライブレコーダ向けAI/画像認識技術の開発
- 分野
- 画像認識
- 関連製品
- ドライブレコーダ
はじめに
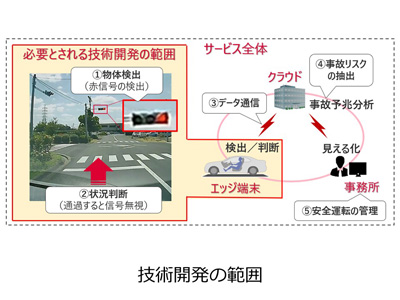
コネクティッドカーの普及に伴い、車両状態や車両周囲環境などの情報を利活用した新たな価値創出に期待が高まっています。当社では車両搭載のエッジ端末から取得した車室内外の情報をクラウド上で解析することで事故リスクを抽出し安全運転の管理をサポートするサービスの実現に取り組んでいます。このようなサービスではエッジ端末で車載カメラにより取得した画像情報から素早く車両周辺の物体を検出し、正確にその状態や状況を判断する技術が必要になります。
今回、エッジ端末上で車載カメラ画像から車両周辺の物体を検出し状況を判断する、軽量で高性能な通信型ドライブレコーダ向けのAI/画像認識技術を開発しました。
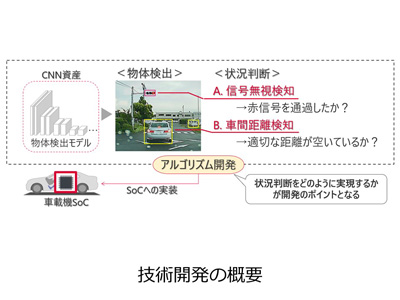
技術開発の概要
当社では画像に映っている物体の位置・種類をエッジ端末上で認識するAIモデル(以下、CNN:Convolutional Neural Network)を保有しています。今回、そのCNN資産を活用して、カメラ画像から車両と信号を検出する物体検出と状況判断を行うアルゴリズムの開発し、車間距離検知と信号無視検知の機能のSoC(System on a chip)上への実装を実現しました。
技術開発における課題
AI技術をSoCに実装する場合、SoC要件に合うようにCNNモデルの処理を軽量化する必要があります。そのため、次の技術課題への対応が必要となります。
課題① 実装制約により物体検出モデルの検知精度が劣化してしまう
劣化により、物体の検出位置のズレや瞬時的な物体の未検出が発生します。車間距離検知機能では、前方車に対する「距離の誤差」や前方車の「未検出」といった問題につながります。
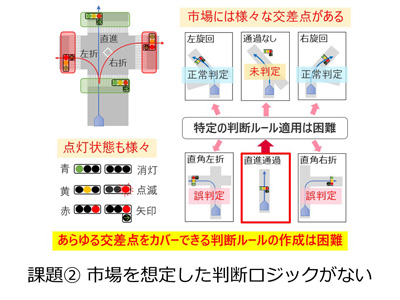
課題② 市場シーンを想定した状況判断ロジックがない
市場にはさまざまな交差点や信号が存在します。信号無視検知機能において、判断ルールを特定の交差点に適合してしまうと、別の交差点では正しく判断できなくなるなどの問題が発生します。

課題への対応
上記課題①、②に対し、以下の取組みを実施しました。
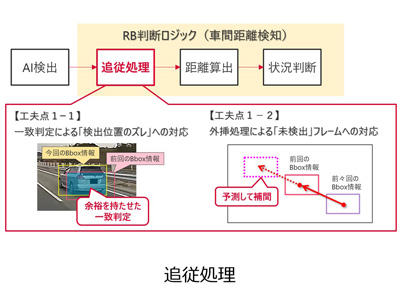
課題① 検知精度劣化を吸収・補間する物体「追従処理」の開発
車間距離検知おいて、車両などの物体を時系列で追従します。その前後関係の一致判定に余裕を持たせることで検知位置のズレを吸収する仕組みと、過去の位置を元に次に検出される位置を予測することで物体の未検出に対応する仕組みを構築しました。これらの「追従処理」の仕組みにより「距離の誤差」や「未検出」を抑制することができました。
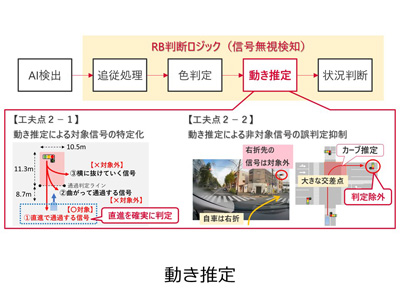
課題② 状況判断すべきルールを限定化する構成の検討
市場を想定した状況判断ロジックの構築を行いました。信号無視検知機能では動き推定(車と信号の相対位置の変化)により、対象信号の特定化と非対象信号の除外をすることで、信号無視の正確な検出と誤報抑制の両立を実現することができました。
成果とまとめ
今回開発した技術により、車間距離検知と信号無視検知の機能をSoC上に実装することができました。今後はさらなる性能改善や機能拡張をしていくとともに、道路標識など車両周辺のその他物体の認識技術への活用を考えております。
