DENSO TEN Technical Review
デンソーテンテクニカルレビュー
四輪IWM(In Wheel Motor)横滑り防⽌制御の開発
- 分野
- e-mobility
はじめに
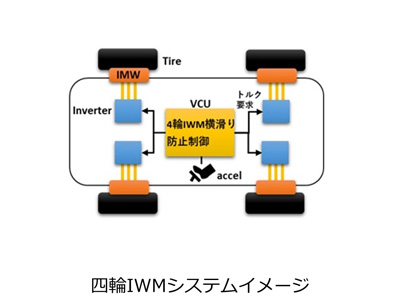
近年、自動車の電動化が進む中、ホイール内にトラクションモータを搭載するIWM(In Wheel Motor)を採用する自動車も登場しており、これらの自動車は駆動輪それぞれのトルクを独立して制御することが可能です。四輪IWM車両においては、四輪独立で正負トルクを制御できることから、車両姿勢を制御するという場面において、IWMのメリットを最大限に発揮できると考えられます。また、当社はVCU(Vehicle Control Unit)による車の安全性向上の実現に向け取り組んでおり、その一つとして、車両の危険な状態を回避するための四輪IWM車両姿勢制御の開発に着手しました。現在は、横滑り防止制御の開発を進めており、車両アンダーステア発生時の横滑り防止効果を車両で確認できましたので、その内容についてご紹介します。

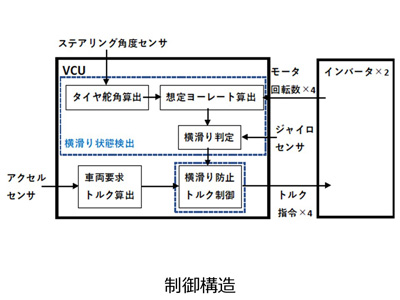
横滑り防止制御仕様
横滑り防止制御は、ステアリング角度センサ(タイヤ舵角検知)、回転センサ、ジャイロセンサにより横滑り状態を検出した後、次のように四輪独立したトルク制御を行います。
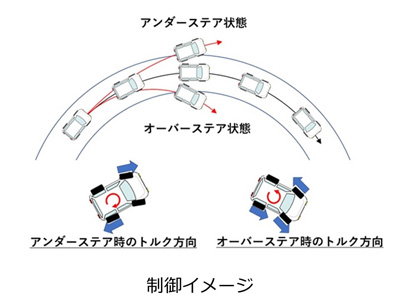
例:アンダーステア状態検出時(右旋回)
…右後輪にブレーキトルクを、左前輪に駆動トルクを、そのほかは0トルクを指令することで右旋回モーメントを発生させます。指令するトルク値は、横滑りの状態を基に基本トルクを設定し、車速やドライバーのステアリング操作による補正を実施します。
この制御により危険な状態を適切に回避することができます。
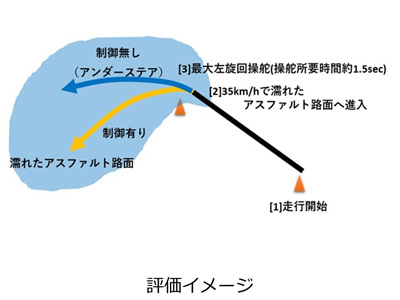
実車評価とまとめ
構築した制御を搭載した評価車両を用い、低μ路において直進状態から急旋回操作を行い、アンダーステアを発生させた評価にて、制御の有効性を確認しました。今後は、さまざまなシーンを想定した車両評価を実施し、四輪IWMにおける車両姿勢の制御技術を確立することで、より安全性が高い車両を市場に展開することを目指します。